Actuators are indispensable parts of most mechanized systems responsible for controlling and moving the various parts of a system, in this case a robotic system. It is operated using energy and the main element of the actuators functionality is linked to converting that energy into motion, depending on the type. Linear actuators for robotic automation are quite common where the most effective motion is linear. Linear actuators for a robotic automation system are based conversion of motor torque into linear motion.
Linear actuators
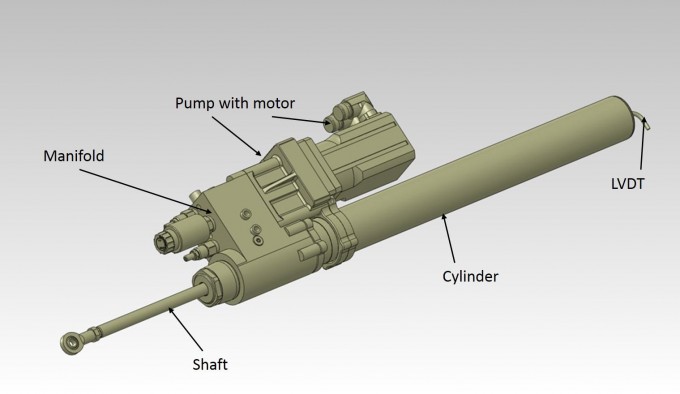
The typical linear actuators will have the engine, gearbox, rotational sensor, rotor switch and a rod or the piston being driven by the system in linear motion. There are quite a number of linear actuators, all of which depend on the mechanism and power source that is used to drive the rod in the linear motion. The most common types of the linear actuators include the mechanical actuators, hydraulic and pneumatic actuators.
Hydraulic
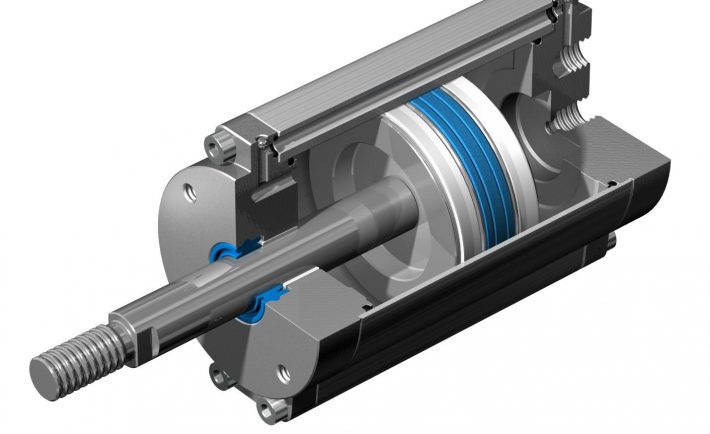
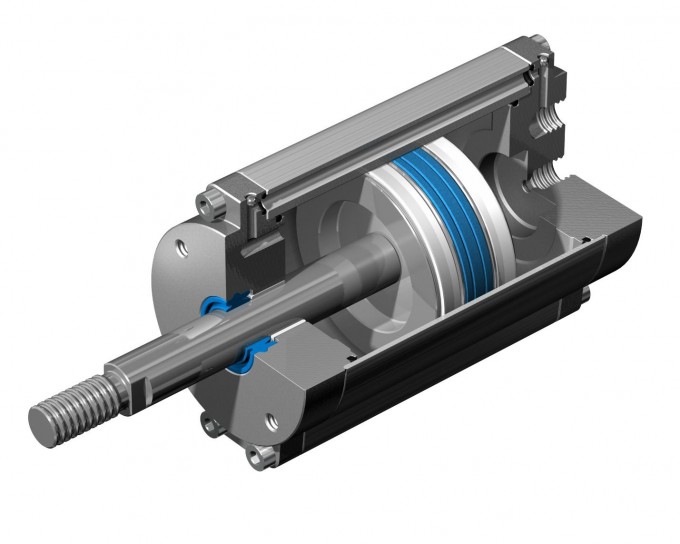
The hydraulic system uses the hydraulic cylinders and pistons. This is a system that largely relied on pressure and the fact that fluids are not compressible. Imbalance in the pressure between the different cylinder of different dimensions provide the pressure build up that is required to lift or move a rod connected to a piston in a linear motion at a given rate of pressure.
Pneumatic

The pneumatic actuator relies on a drive motor and a power transmission mechanism, but uses the mechanism that store energy by means of compression along a pneumatic line. There is some similarity to the hydraulic actuators except that in this system air is used instead of a fluid.
Mechanical
The mechanical system on the other hand is the most basic of the linear actuators relative to the fact that it uses screw method, where the main drive shaft is designed into a screw. With the rotational motion the shaft is driven in a linear motion.



