Linear motion websites cite regularly that creating a linear system requires one has to take into account guides, structural support, drives and most importantly making the right choices from the start. Hence this article seeks to provide insight in linear system engineering.
Single axis is the elementary form of linear motion, and the complex multi-axis are designed with various synchronized simple axes. Positional accuracy, load and speed are the prime aspects that are considered in linear motion. Since linear systems comprise multiple actuators acting as structural members, each actuator must be effective so as to support complex loads encountered during decelerations and accelerations. In this case, actuators are designed with sections of aluminum extrusions that are effective given their rigid and strong nature.
So as to generate linear motion, actuators are fitted with drive mechanisms. The timing drive is most preferred due to its accuracy for various application as well as its low cost.

Linear Actuator – Fixed Center Belt Drive Pitfalls
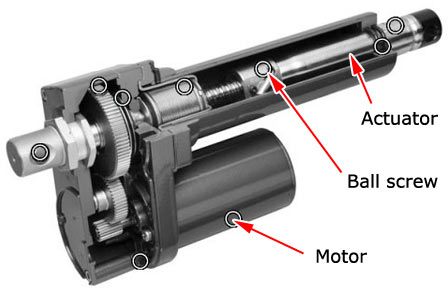
Various mechanical calculations must be made regarding the drive mechanism employed. The fact that actuator’s drive is commonly connected to the motor through a coupling, the mechanical nature of this connection need to be taken into account.
Mechanical calculations are also crucial because linear systems involve bearings. Bearings are categorized as either ball or roller. Ball bearing provides point contact and is usually seen as the low-cost option. On the other hand, roller bearing is often used in highly loaded applications due their nature of spreading loads over a wider surface area.
Despite linear motor becoming popular in the recent times due to its ability to offer a direct-drive option, there is an aspect that is proving to be a challenge in some applications. There is an air gap manage by electromagnetic forces, meaning in events of a power failure it will collapse resulting to major issue on vertical and inclined axes.
In a self-contained linear motor system, a motor is required to drive mechanical actuators. Serve motors and steppers are commonly used. Stepper motors operate by having many poles of electromagnets in the rotor and the stator. They have electronic controller designed to instruct the motor to spin a provided number of steps or poles. Servo motors have few poles but are efficient to use with a system that requires high-resolution response confirming the position of the actuator.
Self-contained servo drive saves 50 percent energy costs
The encoder is one of the most used sensors in the multi-axis linear system. It entails a slide or a glass disc on which marks are inscribed. These marks are analyzed by an electro-optical system giving an indication of the accurate position.
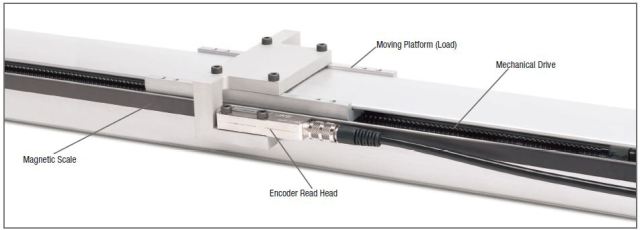
Direct load position sensing with secondary feedback encoders
In conclusion, despite the theoretical view that linear system engineering complex, in the practical sense it is easy to construct. This article has provided insight on the most important aspects required linear motion engineering.



